 Fraunhofer Institute for Electronic Nano Systems
Fraunhofer Institute for Electronic Nano SystemsCombined Sensors
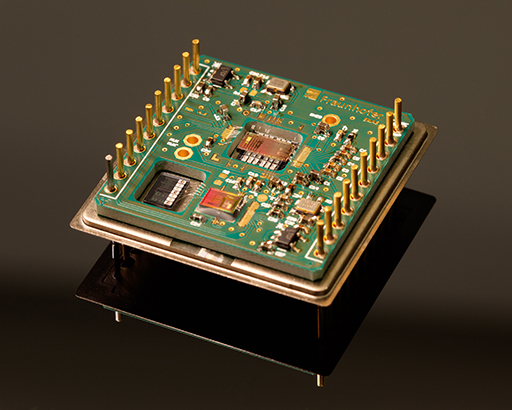
Multisensor with 2-axis acceleration and 1-axis angular rate
Multisensor systems were set up to demonstrate the precise sensors developed and manufactured in-house. The combination of acceleration and angular rate sensors is the base of an Inertial Measurement Unit (IMU). With three of these multisensor systems an IMU with 3 axes for angular rate and 6 axes for acceleration can be built. An IMU determines the position of the system in space, independent of additional external references. The development of the algorithms is done at Fraunhofer ENAS.